





MFC9070 3 истгоҳи термоформер
Тафсилоти мошин

Истифода
Мошин барои истеҳсоли зарфҳои гуногуни пластикии васеъ, аз қабили ҷўйборҳои хӯрокворӣ, ҷўйборҳои пластикӣ, ҷўйборҳои косметикӣ, блистерҳо, табақчаҳо, табақҳо ва дигар ашёҳои марбут ба пластикӣ пешбинӣ шудааст.
Варақаи мувофиқ
PVC, PP, PS, OPS, PET, APET, PETG, CPET ва ғайра.
Хусусиятҳои сохтор
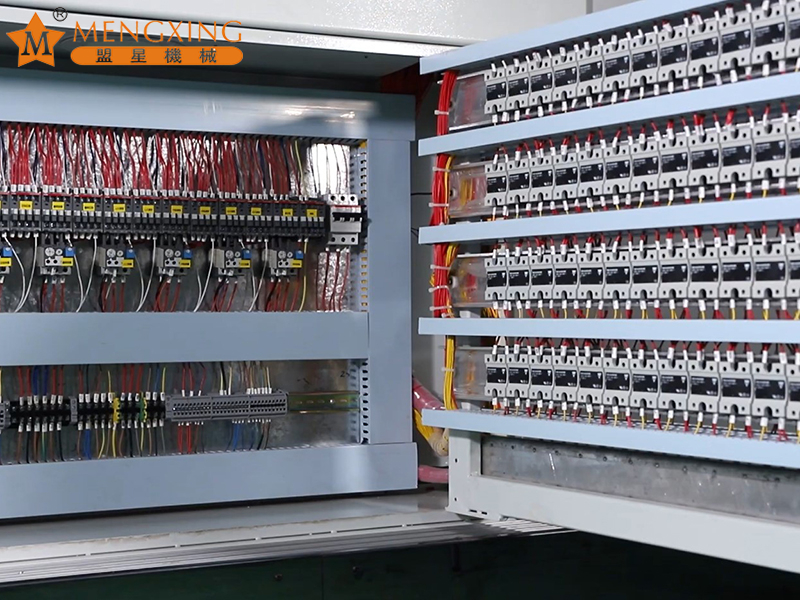
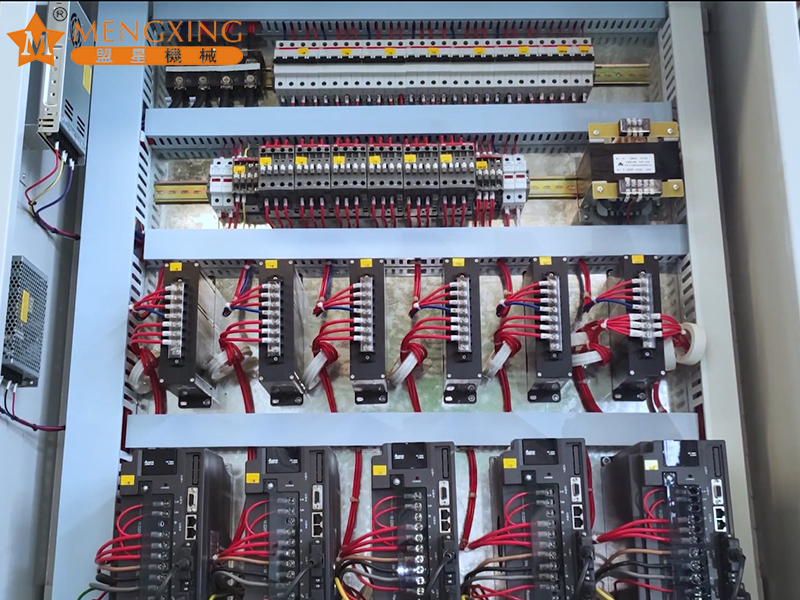
1.Механикӣ, пневматикӣ ва электрикӣ, ҳама амалҳои корӣ аз ҷониби PLC назорат карда мешаванд.Экрани сенсорӣ амалиётро қулай ва осон мекунад.
2.Фишор ва/ё ташаккули вакуум.
3.Up ва поён усули ташаккули қолаби.
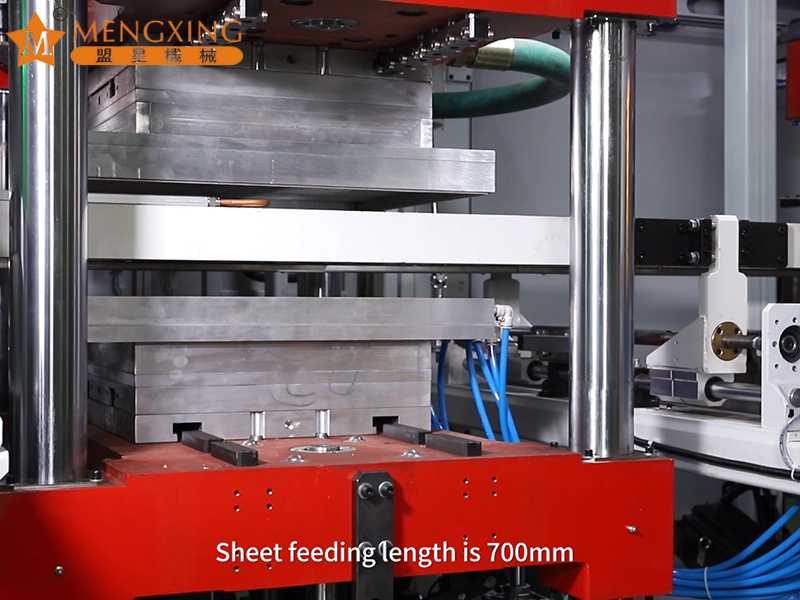
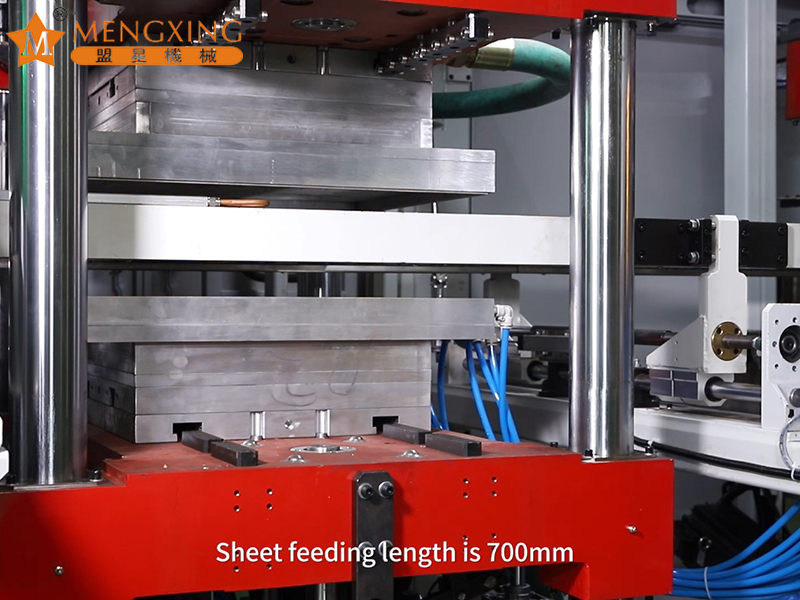
4.Серво муҳаррики ғизодиҳӣ, дарозии таъом метавонад қадами кам танзим карда шавад.Суръати баланд ва дақиқ.
5.Гармкунаки болоӣ ва поёнӣ, гармидиҳии се қисм
6.Heater бо системаи назорати зеҳнии ҳарорат, таъмини автоматии гармидиҳии инфиродӣ назорати гармкунак.Гармидиҳии зуд (3 дақиқа аз 0-400 дараҷа), он аз шиддати беруна таъсир намерасонад.
7.Ташаккул ва буридани шӯъбаи қолаби кушода ва пӯшида аз ҷониби мотори servo назорат карда мешавад, маҳсулот ба таври худкор ҳисоб карда мешавад.
8.Функсияи хотираи маълумот метавонад 120 маҷмӯи маълумотҳои иҷрошударо нигоҳ дорад.
9.Намуди stacking: stacking ба поён / Robot Stacking.
Паҳнои 10. Feeding мумкин аст синхронӣ ё мустақилона дар роҳи барқ тасҳеҳ.
11.Таӯр ҳангоми гарм шудани варақ ба таври худкор берун мебарояд, Фишори ҳаво кофӣ нест.
12.Системаи молидани автоматӣ.
Системаи тағир додани қолаби 13.Quick, Боркунии варақи автоматӣ, кам кардани сарбории корӣ.
Параметри техникӣ
| Бари варақ (мм) | 540-940 | |
| Ғафсии варақ (мм) | 0,1-1,5 | |
| Диаметри максималии варақ (мм) | 800 | |
| Ташаккули зарбаи қолаби (мм) | (боло) 170, (поён) 170 | |
| Қувваи фишори қолаб (тонна) | 80 | |
| Масоҳати максималии ташаккул (мм2) | 900×700 | |
| Минтақаи ташаккулёбӣ (мм2) | 500×400 | |
| Бари ташаккули қолаб (мм) | 500-900 | |
| Дарозии қолаби ташаккул (мм) | 400-700 | |
| чуқурии максималии ташаккул / баландии (мм) | 155/155 | |
| Зарбаи буридани қолаб (мм) | (боло) 170, (поён) 170 | |
| Майдони максималии буридан (мм2) | 900×700 | |
| Қувваи буриш (тонна) | 100 | |
| Сикл (вақт/дақ) | Дастгирии робот Max17 Ҷойгиршавӣ ба поён Max40 | |
| Хунуккунӣ | хунуккунии об | |
| Таъмини ҳаво | ҳаҷм (м3/ дақ) | ≥2 |
| Фишори ҳаво (МПа) | 0,8 | |
| Насоси вакуумӣ | Busch R5 0100 | |
| Таъмини нерӯ | 3 марҳилаи 4 хати 380V50Hz | |
| Қувваи гармидиҳӣ (кВт) | 145 | |
| Максимум қувваи умумӣ (кВт) | 190 | |
| Андоза (L×W×H) (мм) | 13400×3000×3230 | |
| Вазн (T) | ≈25 | |
Унсурҳои техникӣ
| PLC | Делтаи Тайван |
| Монитори экрани сенсорӣ (15 дюйм / ранг) | Делтаи Тайван |
| Моторҳои сервоии ғизоӣ (5,5 кВ) | Делтаи Тайван |
| Ташаккули муҳаррики серво қолаби боло/поён (7,5 кВ/7,5 кВ) | Делтаи Тайван |
| Буридани муҳаррики серво қолаби боло/поён (7,5 кВ/7,5 кВ) | Делтаи Тайван |
| Моторҳои серво (2кВт) | Делтаи Тайван |
| Гармкунак (288шт) | Олмон Элштейн |
| Контакт | Швейтсария ABB |
| Релеи термо | Швейтсария ABB |
| Эстафета | Олмон Вейдмюллер |
| РСС | Швейтсария Карло Гавазси |
| Насоси вакуумӣ | Олмон Busch |
| Занҷираи ғизо | Италия Регина |
| Системаи автоматии молиданӣ | Тайван Чен Ин |
| Сенсори фишори электронӣ | Делтаи Тайван |
| Пневматикӣ | JAPON SMC |
| Силиндр | JAPAN SMC & Taiwan Airtac |
Чаро моро интихоб кунед
Мошинҳои мо дар саросари ҷаҳон фурӯхта шудаанд.Фаъолияти бузурги мошин барои ба даст овардани эътимод ва тавсияи муштарӣ кӯмак мекунад.Мо ба тадқиқот ва коркардҳо дар соҳаи термоформизатсия ва истеҳсоли автоматӣ сармоягузорӣ карданро идома медиҳем.Мо пешрав ва пешвои Чин дар ин соҳа ҳастем.Пайваста кӯшиш мекунад, ки истеҳсолкунандаи сатҳи ҷаҳонӣ шавад.Мо инчунин аз шарикони дигар кишварҳо истиқбол мекунем, ки ба мо ҳамроҳ шаванд ва агентҳои мо гарданд, то бозорро якҷоя омӯзанд ва ба мизоҷони худ хидмат расонанд.
Нишондиҳандаҳои техникӣ ва иқтисодии маҳсулот дар соли 2006 тавассути сертификатсияи системаи идоракунии сифат ISO9001: 2000, маҳсулот дар бозорҳои дохилӣ ва хориҷӣ, ки аз ҷониби корбарон эътимоди амиқ доранд, ба стандарти миллӣ расидаанд, ки онро бо навъи пешрафтаи хориҷӣ муқоиса кардан мумкин аст.
Суратҳои намунавӣ








Тасвирҳои контейнерӣ









